
Our Robots
The following robots are freely available within the physical lab. We have collaborative robots, industrial robots and research platforms.
The lab is located at the ABB Corporate Research Center in Västerås (Forskargränd 7, 772 26)
Mobile YuMi (3x)
- Omnidirectional drive
- Telescopic pillar
- 7-DOF collaborative robot arms (2x)
- Payload: 0.5 kg (2x)
- Reach: 0.559 m
- Pose repeatability: 0.02 mm

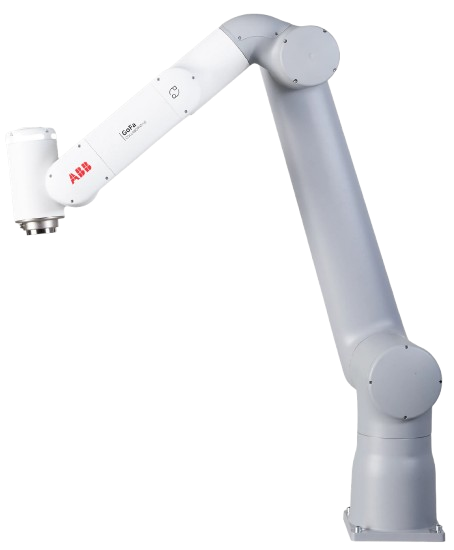
GoFa 5
- 6-DOF Collaborative robot arm
- Payload: 5 kg
- Reach: 1.05 m
- Pose repeatability: 0.02 mm
- Max TCP velocity: 2.2 m/s
- Max controlled TCP acceleration: 36.9 m/s2
GoFa 12
- 6-DOF Collaborative robot arm
- Payload: 12 kg
- Reach: 1.37 m
- Pose repeatability: 0.02 mm
- Max TCP velocity: 2 m/s
- Max controlled TCP acceleration: 27 m/s2

IRB 1200
- 6-DOF Industrial robot arm
- Payload: 7 kg
- Reach: 0.7 m
- Pose repeatability: 0.02 mm
- Max controlled TCP acceleration: 35 m/s2
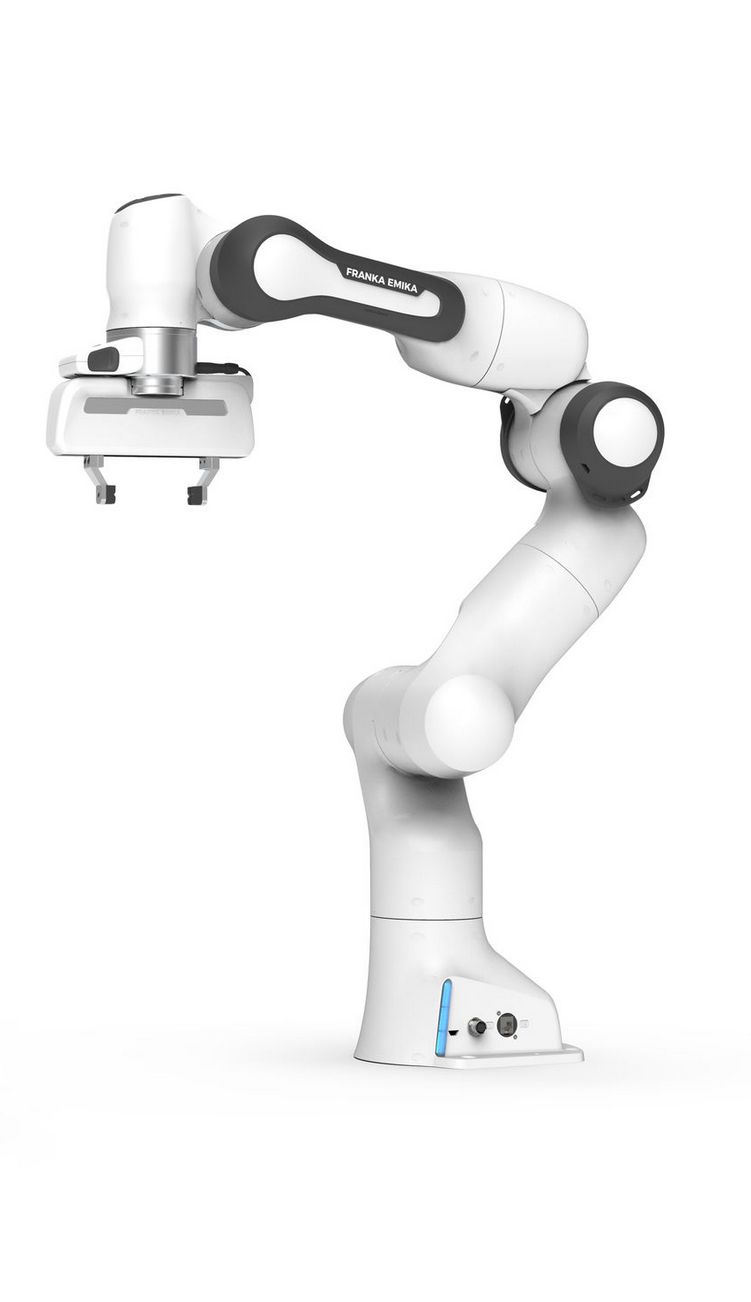
Franka Panda (2x)
- 7-DOF Collaborative robot arm
- Payload: 3 kg
- Reach: 0.855 m
- Pose repeatability: 0.2 mm
- Max TCP Velocity: 2 m/s

Dual-Arm YuMi (3x)
- 7-DOF collaborative robot arms (2x)
- Payload: 0.5 kg (2x)
- Reach: 0.559 m
- Pose repeatability: 0.02 mm
Interfaces
The robots in the lab support the following interfaces for communication and programming:
- RAPID: programming language for ABB robots
- Robot Web Services (RWS): RESTful API for communication with ABB robots
- Externally Guided Motion (EGM): remote control interfaces for movement control of ABB robots
- ROS 2 Humble
- Python: through RWS Python wrapper (compatible with RWS 1.0 & 2.0)
Integrating with robots is usually a time-consuming task in robotics research. For this reason, we have developed ROS 2 drivers for the robots in the lab, to ease integration and add flexibility when switching among different robots. However, we are more than happy to expand the listed interfaces to better accommodate different integration needs.
Simulation Environment
The physical lab has a simulated counterpart, where users can develop and test applications during their research. In the digital lab, the robots and environment from the physical lab are made available in a simulated setup, which preserves the same interfaces. This allows achieving seamless integration between the physical and simulated robots. There are two versions of the digital lab:
1. Gazebo
- A popular open-source simulator in robotics with a plethora of control and sensor plugins that, when combined with ROS 2, formulates a complete R&D platform with easy access to state-of-the-art algorithms.
2. AGX Dynamics – Unreal Engine
- Algoryx, together with ABB, has developed a high-fidelity simulation model of the mobile lab environment and mYuMi. This model has state-of-art graphics, an ABB virtual controller for the robot, and allows high-fidelity physical interaction between the robot and its environment.

