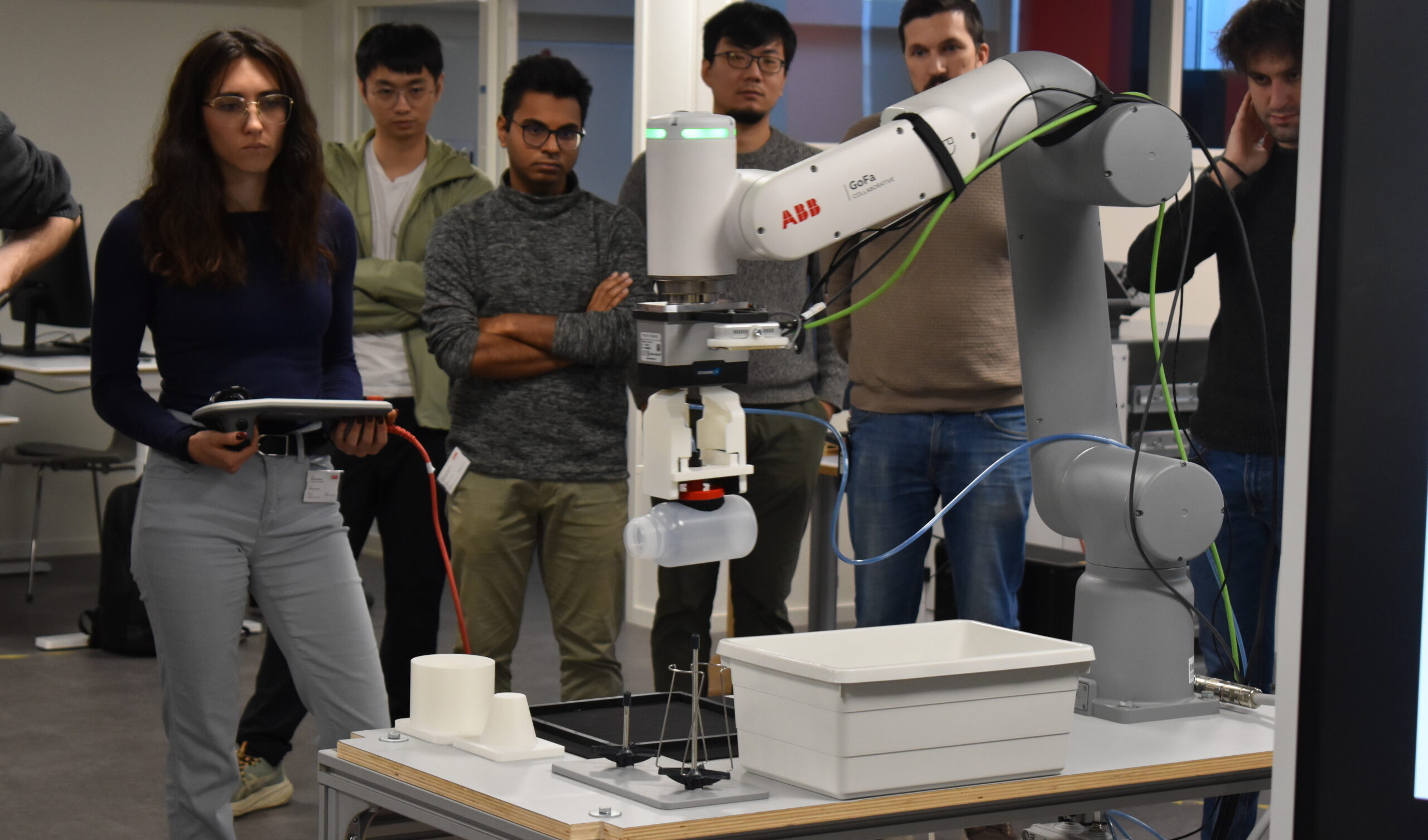
Yesterday we hosted the mobile manipulation challenge at the lab in ABB’s Corporate Research Center in Västerås. The four teams from Örebro University, LTH, KTH, and Politecnico di Milano presented their solutions in front of each other, the jury, and a few other interested visitors. The use case for this challenge, which was provided by AstraZeneca, was a lab automation task where dirty glassware needs to be collected and via cart-pushing is transported to a dishwasher where the glassware can be loaded for cleaning. It was a delight to see the different directions the teams took, and to take note of common agreements between the teams on what is required to solve this problem.
First up was the team of Politecnico di Milano. Their implementation had an advanced and impressive bin-picking solution that would find the optimal object to grasp and attempt to grasp it using suction – a good method considering the plastic replicas are supposed to be glass. After a regrasping phase, they could fill the dishwasher pins using a demonstration approach. Since the team could not easily access a mobile robot, they did not attempt the cart-pushing task.

Next up was the team from Lund. Unfortunately, they did not manage to integrate the solution on hardware in time, but they were able to show a simulation of an impressive whole-body controlled cart-pushing solution. Actually, they went for cart-pulling, which has some advantages over cart-pushing especially considering we would like to have collision-free paths.
The team from KTH was the only team that attempted both tasks. They could identify the pose of the cart using color masking to find the blue handlebar with ease, and using a compliant controller make sure that the cart was steerable during the pushing. Also, since they used the same mobile robot for the dishwasher loading, they had to detect poses for the bottles and pins (the base could have a localization error after all).
Finally, it was Örebro’s turn. Using their franka panda, they had a robust system for bin picking and dishwasher loading that was adaptable to different positions of the bin and the pins. Furthermore, it could detect on the fly what kind of bottle or cup they had picked and decide which type of pin to stack it into. Various techniques like feature detection, pattern matching, cylinder fitting, and filtering methods were used to make the robot work. Furthermore, with the use of a Behaviour Tree, the robot could run robustly over multiple iterations and correct errors on the fly. Unfortunately, their custom mobile robot was not finished on time and thus they did not attempt the cart-pushing task.
While all teams showed very interesting approaches and impressive demonstrations, there could of course be only one winner. After tough discussions within the jury – it was a very close call – the team of Örebro University came out as the winner to be sent to Automatica 2025! Congratulations!
The teams voiced that they have been happy participating in the challenge, as it gave them a good use-case and interesting papers to write. Furthermore, we will probably see more of them in the WARA as they said they had a very positive experience regarding available hardware and engineering support. Do you think you have a good solution – for this challenge or any other use-cases – you would like to try out on hardware? Please don’t hesitate to contact us!
We would like to thank all the teams for participating and AstraZeneca for hosting this challenge with us. Once again congratulations to the team from Örebro University, and we are looking forward to hosting more challenges in the coming years!